

噪声可以理解为“妨碍人们器官对所接受的信源信息理解的因素”。
例如,一幅黑白图像,其亮度分布假定为 ,那么对其起干扰作用的亮度分布 便称为图像噪声。
噪声在理论上可以定义为“不可预测,只能用概率统计方法来认识的随机误差”。
将图像噪声看成是多维随机过程是合适的,描述噪声的方法完全可以借用随机过程及其概率分布函数和概率密度函数。
但是在很多情况下,这种描述方法很复杂,甚至不可能,而且实际应用往往也不必要,通常是用其数字特征,即均值方差、相关函数进行处理。
外部噪声是指系统外部干扰从电磁波或者经电源传进系统内部的噪声,如电气设备、天体放电现像等引起的噪声。主要外部干扰如下:
(1) 由光和电的基本性质所引起的噪声。
(2) 电器的机械运动产生的噪声。如, 各种接头因抖动引起的电流变化所产 生的噪声;磁头、磁带抖动引起的抖动噪声等。
(3) 元器件材料本身引起的噪声。如磁带、 磁盘表面缺陷所产生的噪声
(4) 系统内部设备电路所引起的噪声。如电源系统引入的交流噪声,偏转系统和箝位电路引起的噪声等。
图像中的噪声有以下三个特点:
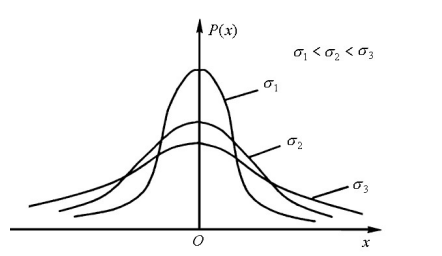
(1) 高斯噪声
高斯噪声是一种源于电子电路噪声和由低照明度或高温带来的传感器噪声。高斯噪声也常称为正态分布噪声,符合高斯分布。是自然界中最常见的噪声。高斯噪声可以通过空域滤波的平滑滤波方法来消除。
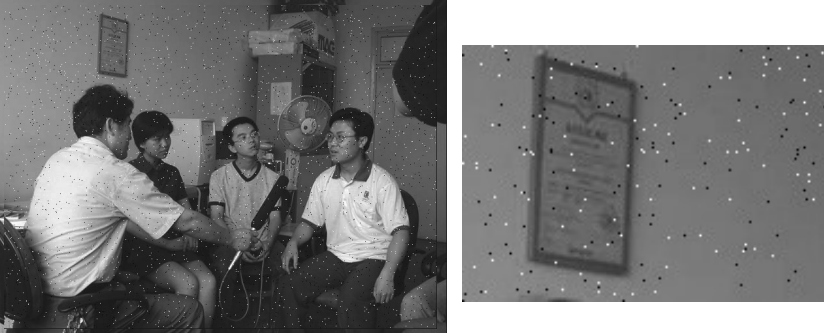
(2)椒盐噪声
椒盐噪声又称为双极脉冲噪声,其概率密度函数为:
椒盐噪声是指图像中出现的噪声只有两种灰度值, 分别为 和 ,通常情况下脉冲噪声总是数字化为允许的最大或最小值,所以负脉冲以黑点(类似胡椒)出现在图像中,正脉冲以白点(类似盐)出现在图像中。
椒盐噪声示例:
高斯噪声的特征: 出现的位置是一定的(每一个点上),但噪声的幅值是随机的。
椒盐噪声的特征: 出现位置是随机的,但噪声的幅值是基本相同的。
★改善降质图像的方法有两类:图像增强和图像复原
”
★不考虑图像降质的原因, 只将图像中感兴趣的部分加以处理或突出有用的图像特征,故改善后的图像并不一定要去逼近原图像。主要目的是要提高图像的可懂度
”
图像增强处理的方法基本上可分为空域法和频域法两大类。
空间域法
在原图像上直接进行数据运算,对像素的灰度值进行处理
它又分为两类: 点运算 和 局部运算
频域法
在图像的变换域上进行处理,增强感兴趣的频率分量,然后进行反变换,得到增强了的图像。
针对图像降质的具体原因,设法补偿降质因素,使改善后的图像尽可能地逼近原始图像。
空域滤波器的分类:
按处理效果分:平滑滤波器 与 锐化滤波器
按数学处理分: 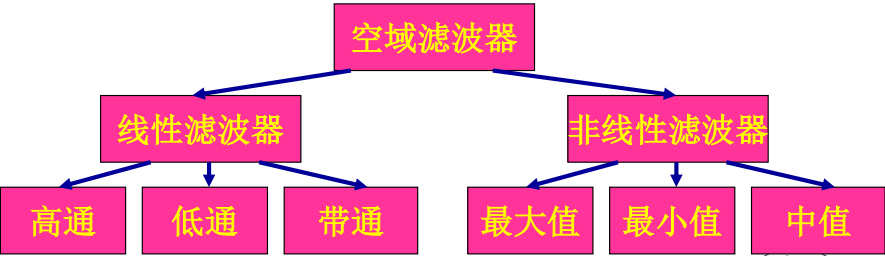
线性滤波器的定义: 线性滤波器是线性系统和频域滤波概念在空域的自然延伸。其特征是结果像素值的计算由下列公式定义:
其中: 是模板的系数
是被计算像素及其领域像素的值
本质就是利用模板(滤波器)进行的卷积运算
主要的线性滤波器及其用途:
非线性滤波器的定义: 使用模板进行结果像素值的计算,结果值直接取决于像素领域的值,而不使用乘积和的计算。
主要的非线性滤波器:
空间平滑滤波器包括:线性平滑滤波器、统计排序非线性滤波器(中值滤波)
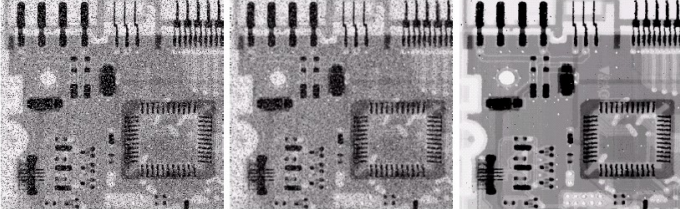
分别采用 像素的方形均值滤波器得到的平滑结果:
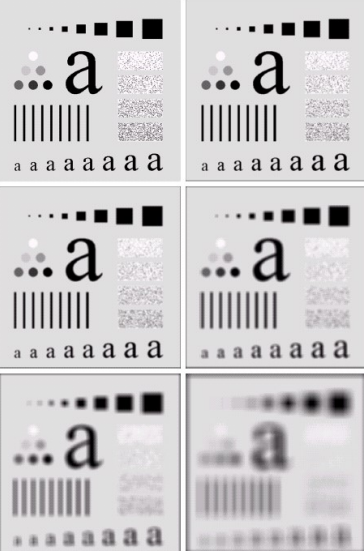
可以得出的结论是: 模板尺寸越大,图像越模糊,图像细节丢失越多 。
如果图像处理的目的是去除噪声,那么,线性平滑低通滤波在 去除噪声的同时也钝化了边和尖锐的细节 。
统计滤波器是非线性滤波器;
滤波器模板包围的图像区域中像素排序,统计排序结果代替中心像素的值;
中值滤波器 是应用最广泛的统计滤波器;
中值滤波对一定类型的随机噪声(如椒盐噪声)提供了优秀的去噪能力,比小尺寸的线性平滑滤波器的模糊程度明显低。
中值滤波
原理:
用模板区域像素的中值,作为结果值
强迫突出的亮点(暗点)更像它周围的值,以消除孤立的亮点(暗点)
中值滤波算法的实现
将模板区域内的像素排序,求出中值。
例如: 的模板,第 大的是中值,
的模板,第 大的是中值,
的模板,第 大的是中值,
对于同值像素,连续排列。如
中值滤波算法的特定
在去除噪声的同时,可以比较好地保留边地锐度和图像地细节。
中值滤波器和均值滤波器的比较
图像边缘是图像的基本特征之一,它包含对人类视觉和机器识别有价值的物体图像边缘信息。
边缘是图像中特性(如像素灰度、纹理等)分布的不连续处,图像周围特性有阶跃变化或屋脊变化的那些像素集合。图像边缘存在于目标与背景、目标与目标、基元与基元的边界,它标示出目标或基元的实际含量,是图像识别信息最集中的地方。
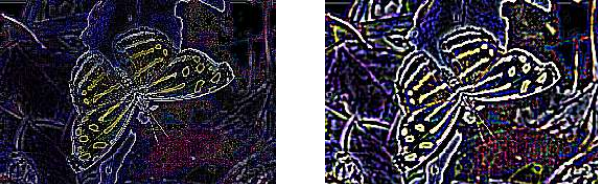
图像锐化就是要突出图像边缘,抑制图像中非边缘信息,使图像轮廓更加清晰。
由于边缘占据图像的高频成分,所以边缘增强通常属于 高通滤波 。
图像锐化的应用主要有:
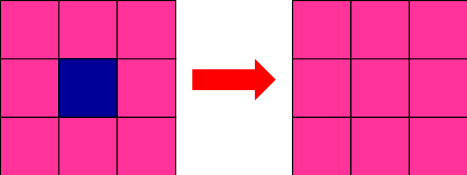
基本高通滤波模板
高频补偿滤波
图像微分,包括:
一阶微分——梯度法
二阶微分——拉普拉斯算子
1. 基本高通滤波模板
如前所述,图像锐化是要增强图像频谱中的高频部分,就相当于从原图像中减去它的低频分量,即原始图像经平滑处理后所得的图像。选择不同的平滑方法,会有不同的图像锐化效果。
或
为原像, 为平滑后图像, 为输出图像
高通滤波器模板系数的设计:
设计的原则
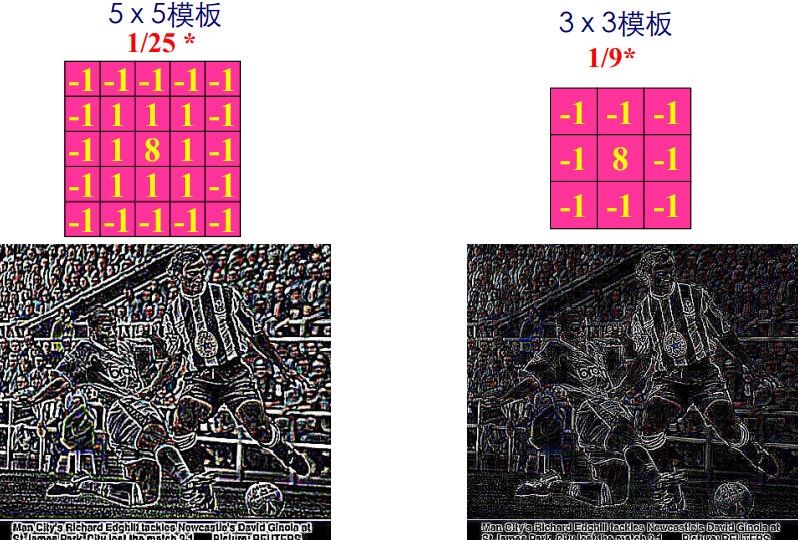
效果分析:
基本高通空域滤波的缺点和问题:
2. 高频补偿滤波
高频补偿滤波的原理:
弥补高通滤波的缺陷,在增强边和细节的同时,不丢失原图像的低频成分。
高通滤波可看作为:高通 = 原图 – 低通
在上式原图上乘一个扩大因子A,有高频补偿滤波:
高频补偿 = A原图 – 低通 = (A – 1)原图 + (原图 – 低通) = (A – 1)原图 + 高通
滤波器扩大因子及模板系数设计
高频补偿滤波器效果的分析
3. 图像微分
一阶微分(差分表示):
二阶微分:
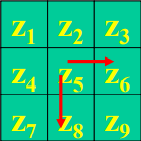
一阶微分(梯度法)
在图像处理中应用微分最常用的方法是计算梯度。函数 在 处的梯度为一个向量:
计算这个向量的大小为:
考虑到一个 图像区域, 代表灰度级,上式在点 的 值可用数字方式近似。
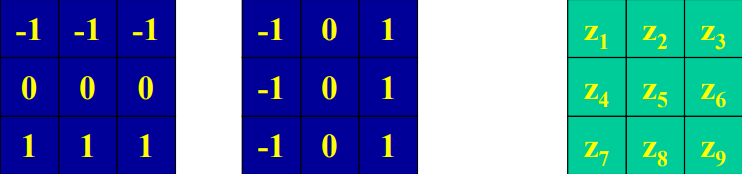
用 近似
用 近似,
组合为:
用绝对值替代平方和平方根有:
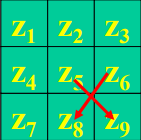
另一种计算方法是使用交叉差:
一阶微分滤波器
微分滤波器模板常用如下三种:
算子

算子
梯度算子—— 的梯度模板
算子
采用梯度微分锐化图像,同时会使噪声、条纹等得到增强,
算子则在一定程度上克服了这个问题。

式中:
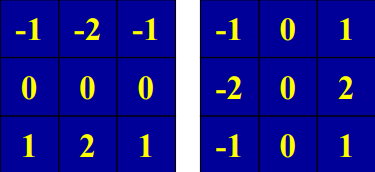
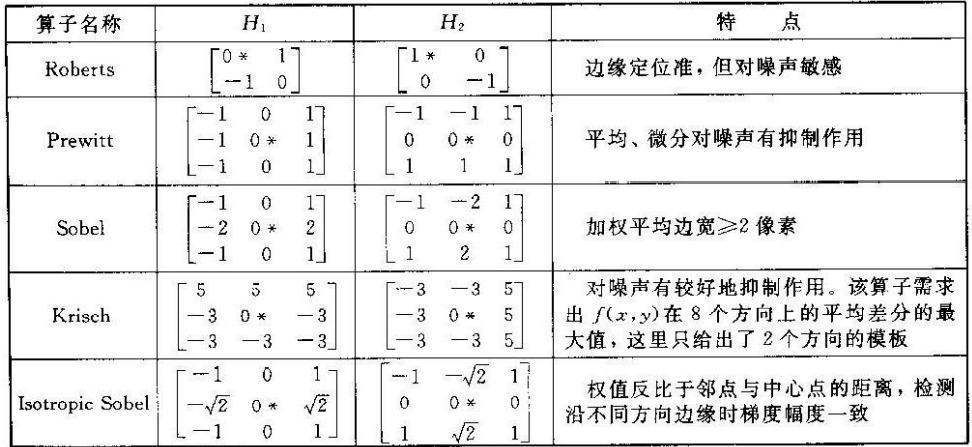
常见的图像一阶微分梯度算子
二阶微分
对数字图像来讲, 的二阶偏导数可表示为:
拉普拉斯算子是常用的边缘增强算子,拉普拉斯运算也是偏导数运算的线性组合运算,而且是一种各向同性(旋转不变性)的线性运算。拉普拉斯算子 为:
采用拉普拉斯算子对图像的增强的基本方法可表示为:


